Featured Project
Chu Chu: An Interactive Companion Robot
Chu Chu is a mobile interactive companion robot inspired by a mouse, featuring ears, an articulated tail, and a dynamic emotional system that responds to user interaction. The project was awarded 2nd place among our class of ME322 engineering design projects.
Project Overview
Chu Chu is a mouse-inspired companion robot designed to simulate the behavior of a living pet through physical movement, emotional expression, and user interaction. Named after the Japanese onomatopoeia for a mouse squeak ("chu chu"), the robot features ears, an articulated tail, and an evolving personality driven by sensors, embedded electronics, and behavior-based software. As users interact with Chu Chu, it responds to its environment, displays emotional states, and unlocks additional behaviors through a dynamic happiness system.
Key Results
2nd Place
Awarded second place among our class of ME322 design projects
4 Main Parts + Tail
PLA body assembly with modular electronics access
Happy, Playful, Lonely, & Hungry
Dynamic emotional states simulated through software and hardware outputs
7.19 hr
Estimated battery life determined through power consumption analysis
Personal Contributions
- Led the mechanical design and CAD development of Chu Chu in SolidWorks.
- Designed the chassis, exterior body panels, integrated mounts, and structural supports.
- Developed mounting features for the microcontroller, sensors, LCD display, battery, and drivetrain components.
- Contributed to electronics integration, system testing, and final assembly validation.
Mechanical Design
Chu Chu was designed in SolidWorks as a compact electromechanical platform that integrated the drivetrain, sensors, battery, microcontroller, and display within a fully 3D-printed PLA body. The final assembly consisted of five printed components, including the chassis, face cage, rear panels, and an articulated tail, while maintaining a cute mouse-inspired appearance through its ears and tail.
Integrated mounting features were designed directly into the chassis to secure the electronics without requiring secondary brackets. Multiple design iterations refined component packaging, wire routing, structural durability, and drivetrain performance, resulting in a compact and reliable companion robot suitable for repeated interaction and testing.
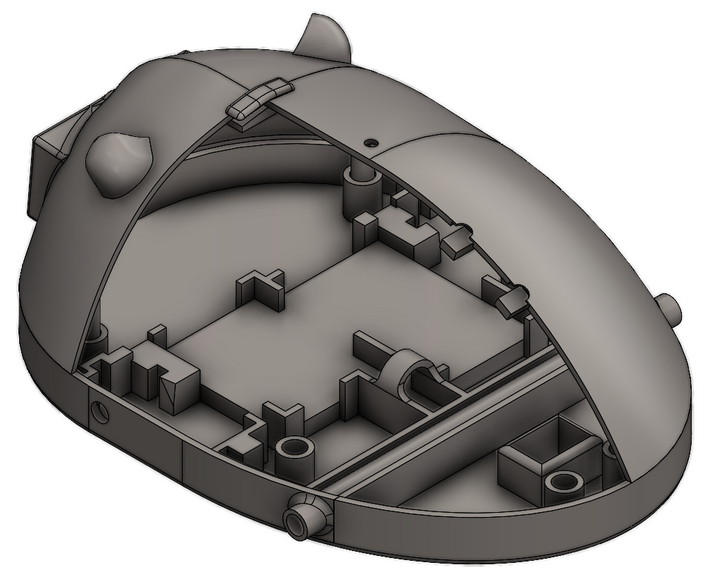
Final chassis geometry and integrated mounting features.

Fully Assembled Robot
Design Iteration
Initial Prototype
Established the overall body geometry and packaging of the drivetrain, electronics, and sensors.
System Integration
Refined component placement, accessibility, structural supports, and electronics packaging to improve reliability.
Final Design
Implemented drivetrain improvements, reinforced mounting features, and optimized assembly stability for testing and operation.
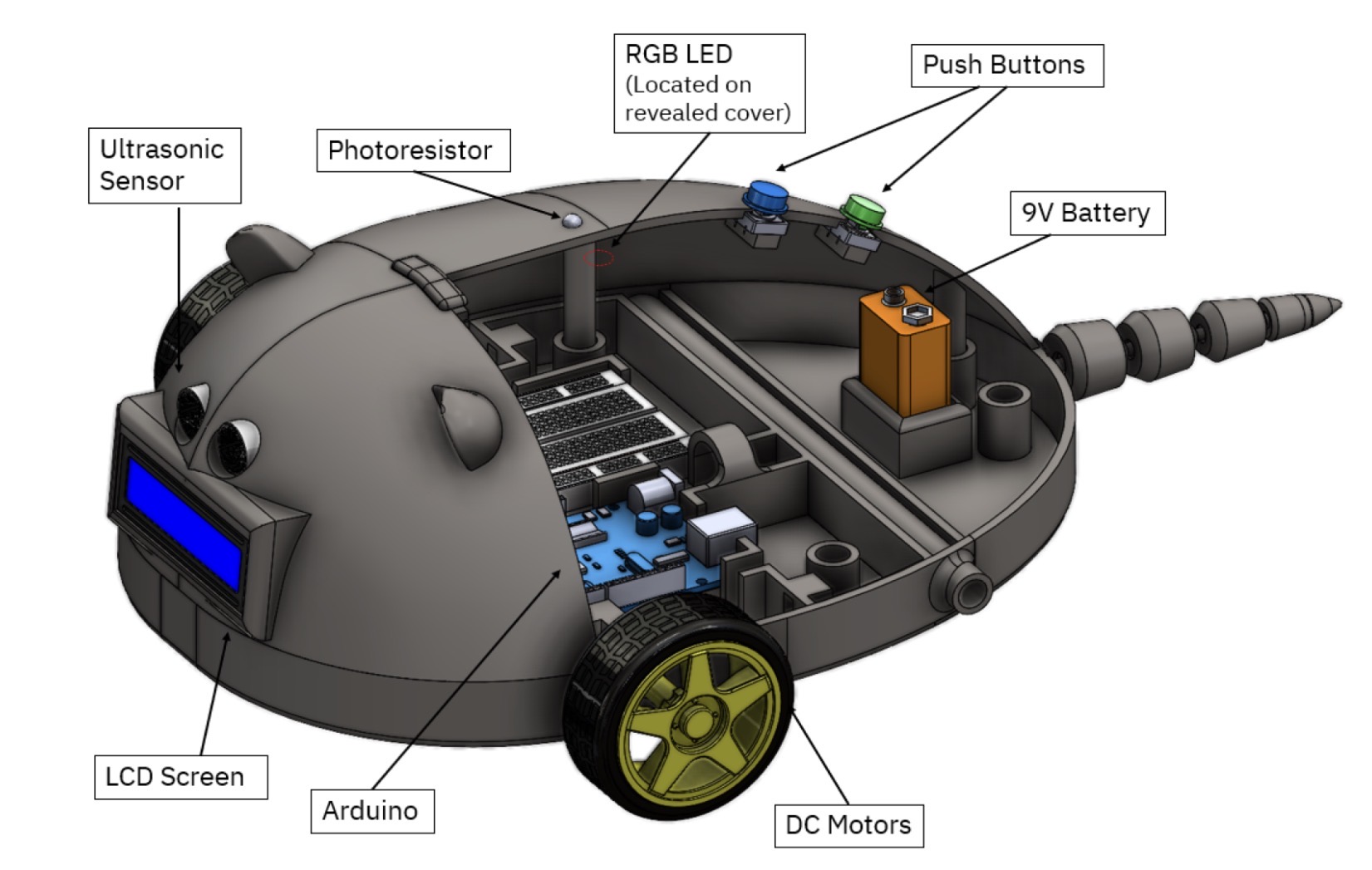
Electronics and System Architecture
- Arduino microcontroller for autonomous behavior and emotional state control
- Ultrasonic sensor for obstacle detection and autonomous movement
- LCD display for facial expressions and emotional feedback
- RGB LED for additional emotional state indication
- Push buttons and photoresistor for interactive user input
- DC motors and drivetrain system for autonomous roaming behavior
The electronics architecture prioritized compact packaging and reliable integration within the limited chassis volume. The system was initially developed in Tinkercad before physical implementation, with wiring layout, power distribution, and component placement refined throughout testing to improve reliability and maintainability.
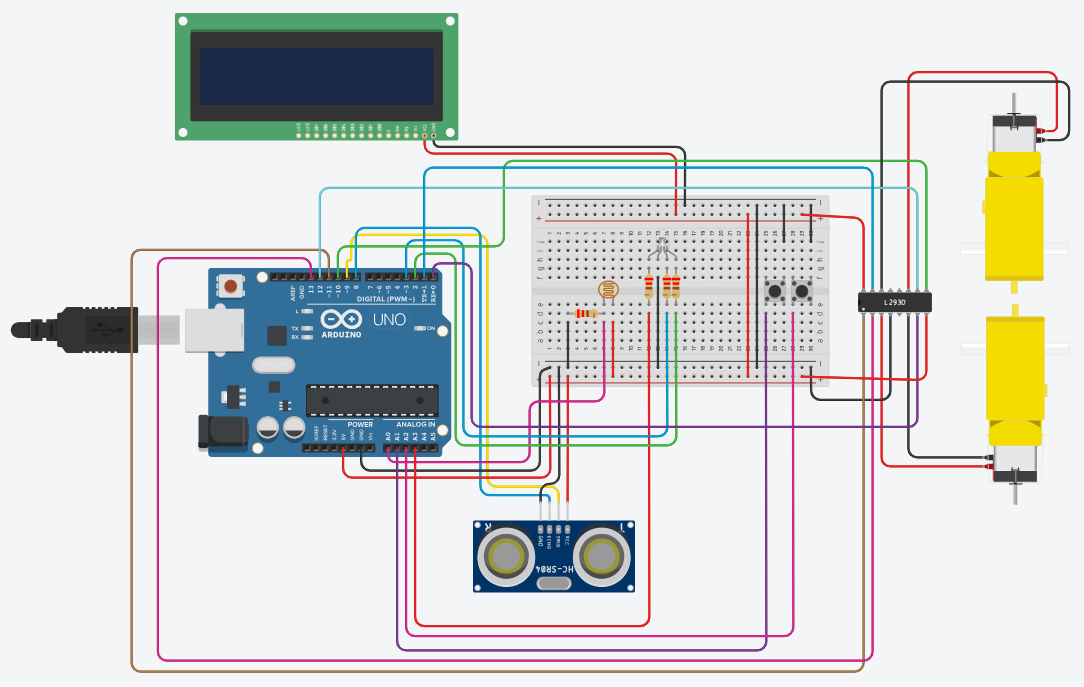
System wiring and electronics integration layout.
Autonomous Behavior Logic
Chu Chu simulated an evolving personality through emotional state logic, environmental sensing, and user interaction. Push buttons and a photoresistor represented feeding, petting, and attention, allowing users to directly influence the robot's emotional state and behavior.
Emotional conditions controlled movement patterns, LCD facial expressions, and RGB LED outputs. A dynamic happiness system rewarded positive interaction by unlocking additional behaviors and tricks, while lower emotional states produced more passive responses. Ultrasonic sensing enabled autonomous roaming and obstacle avoidance throughout operation.
Challenges and Engineering Decisions
Behavior Logic Tuning
Balanced emotional state transitions, interaction timing, and autonomous movement through iterative software tuning.
Electronics Packaging
Integrated the drivetrain, sensors, battery, display, and wiring into a compact chassis while maintaining accessibility.
Drivetrain Design
Replaced the original rear axle with a ball-and-socket wheel system to improve maneuverability.
Future Improvements
Tail Animation
Add a servo-actuated tail capable of expressing emotional states through physical movement.
Audio Interaction
Integrate a microphone and speaker system to support voice commands, sound effects, and interactive behaviors.