Featured Project
NaviBot: Autonomous Navigator
Designed and built a fully autonomous robot capable of navigating an obstacle course using ultrasonic sensing and coordinate-based pathfinding, completing the final course in 1 minute 21 seconds with zero collisions.
Project Overview
NaviBot is a fully autonomous robot designed to navigate an obstacle course using ultrasonic sensing, coordinate-based pathfinding, and real-time obstacle avoidance. The project combined custom mechanical design, embedded electronics, sensor integration, and autonomous control software into a compact 3D-printed platform that completed the final competition course in 1 minute 21 seconds with zero collisions.
Key Results
1:21
Final autonomous course completion time
ZERO
Collisions during final competition run
6
Major chassis design iterations developed and tested
MQTT & LiDAR
Integrated real-time position tracking with autonomous navigation
Personal Contributions
- Led the mechanical design and CAD development of the robot chassis in SolidWorks.
- Designed integrated mounts for sensors, electronics, OLED display, and structural supports.
- Optimized sensor coverage, wiring organization, and component packaging for reliable operation.
- Contributed to the integration and testing of the autonomous navigation and obstacle avoidance system.
Mechanical Design
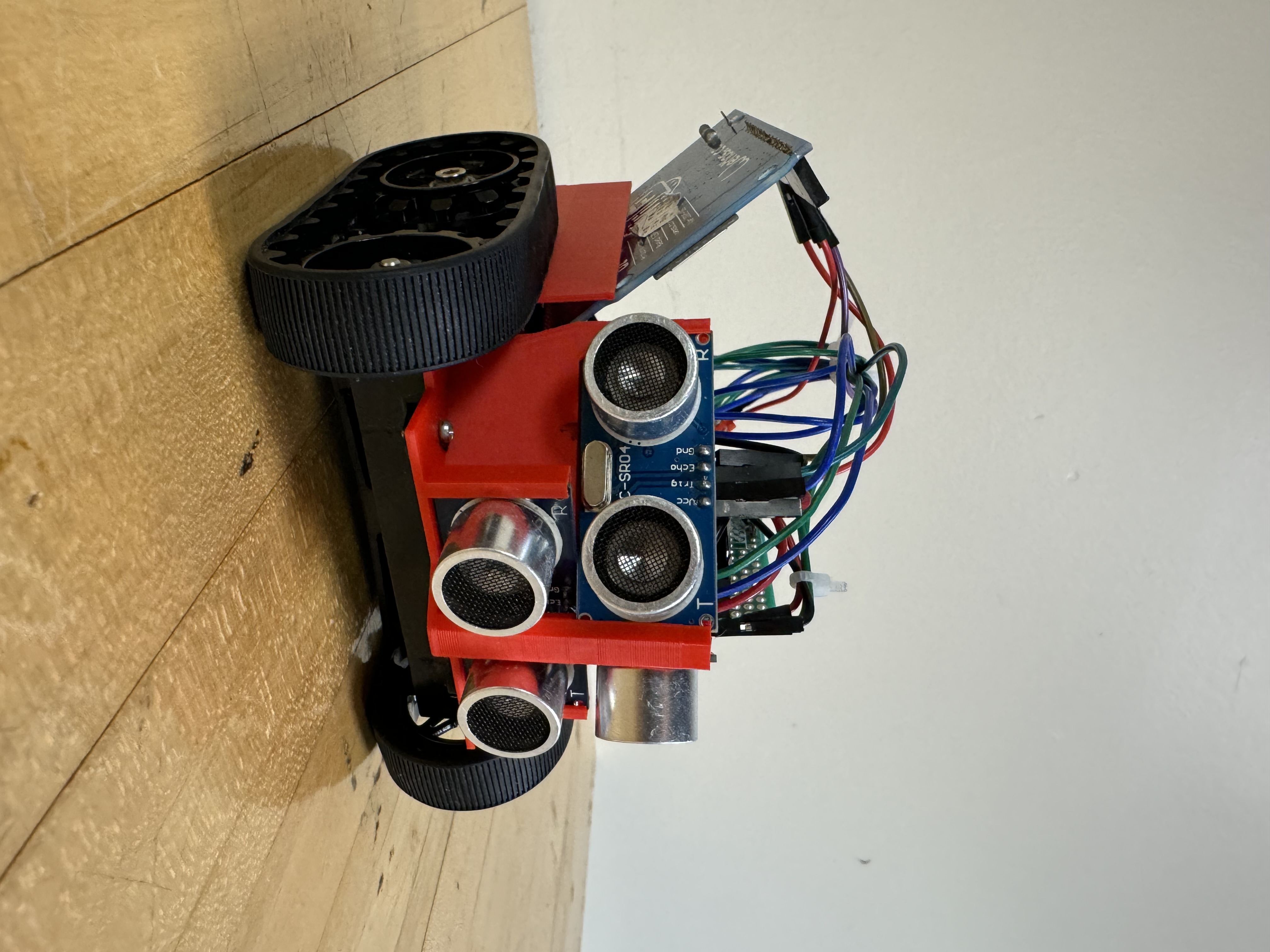
NaviBot was designed in SolidWorks as a compact autonomous robot that integrated the drivetrain, sensors, electronics, and display into a single 3D-printed chassis. Integrated mounting features were built directly into the structure for the ultrasonic sensors, OLED display, motors, PCB, and supporting hardware, reducing assembly complexity while maintaining a lightweight and manufacturable design.
Multiple design iterations refined sensor placement, structural stability, wire routing, and overall system packaging. The final design incorporated reinforced sensor mounts, improved motor supports, and a crate-style electronics compartment that securely housed the PCB and wiring while preserving accessibility for assembly and testing.
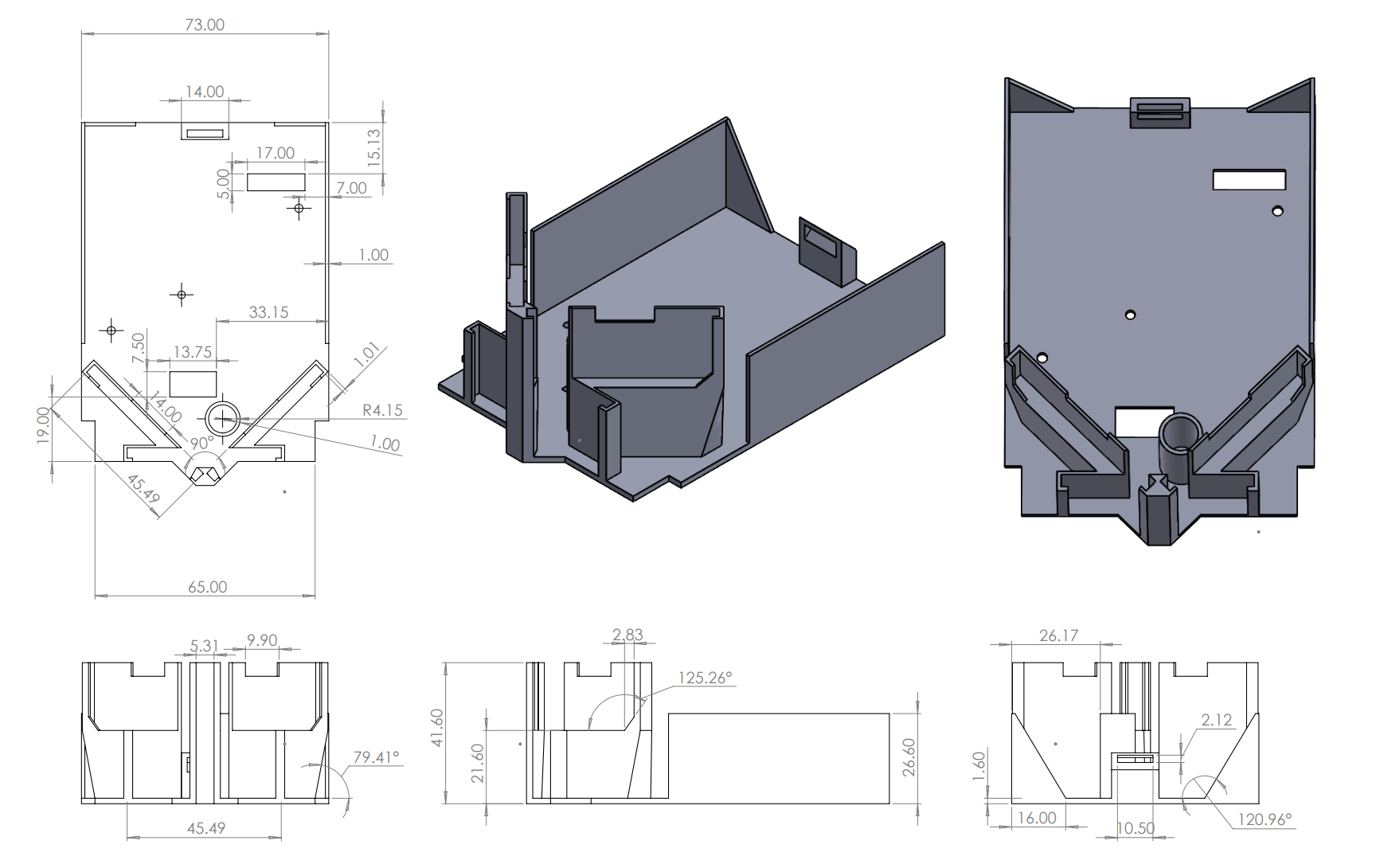
Final Chassis Drawing and Integrated Mounting Features
Design Iteration
Initial Prototype
Established drivetrain, sensor placement, and overall chassis packaging.
Integration Refinement
Improved sensor coverage, structural stability, wire routing, and electronics organization through multiple design iterations.
Final Design
Integrated PCB mounting, reinforced sensor supports, and a compact electronics compartment to improve manufacturability and reliability.
Electronics and System Architecture
- Wemos D1R1 (ESP8266) microcontroller for autonomous navigation control
- Three ultrasonic sensors for real-time obstacle detection and wall tracking
- DC drivetrain motors with motor driver integration for autonomous movement
- OLED display for live coordinate and navigation feedback
- Custom PCB for organized power and signal distribution
The electronics architecture was designed around compact packaging and reliable sensor integration within a limited chassis footprint. As development progressed, the system transitioned from a breadboard prototype to a custom PCB layout, improving wiring organization, maintainability, and overall reliability.
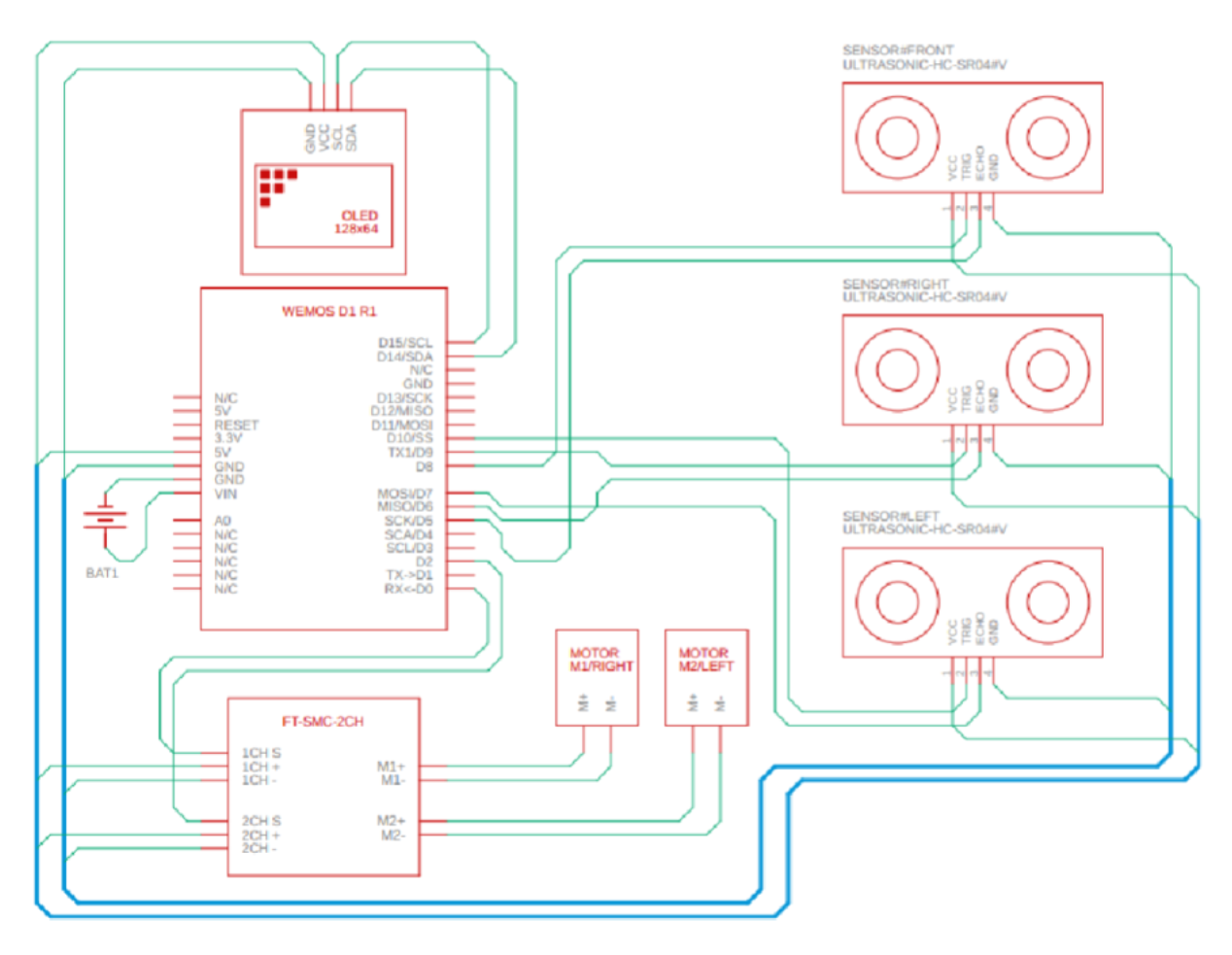
System Wiring and Board-to-Sensor Connections
Autonomous Navigation Logic
NaviBot combined coordinate-based pathfinding with real-time obstacle avoidance to navigate the competition arena without human input. Position data provided through the MQTT network and LiDAR tracking system allowed the robot to continuously determine its location, calculate its orientation relative to target coordinates, and adjust its movement toward each destination.
Three ultrasonic sensors provided obstacle detection and wall-tracking capabilities, allowing the robot to identify nearby obstacles and make directional corrections during navigation. A major software challenge was balancing target-seeking behavior with collision avoidance, requiring iterative tuning of sensor thresholds, motor outputs, and decision logic. The final navigation algorithm successfully guided the robot through the course with zero collisions and a completion time of 1 minute 21 seconds.
Challenges and Engineering Decisions
Sensor Stability and Alignment
Improved mounting geometry and retention features to maintain reliable ultrasonic sensing.
Electronics Packaging
Redesigned internal layouts and wire routing to prevent interference with drivetrain components.
Pathfinding vs Obstacle Avoidance
Balanced coordinate-based pathfinding with real-time obstacle avoidance through iterative testing and software tuning.